Для возможности использования роботов в реальной повседневной жизни они должны уметь выполнять всевозможные задачи, начиная от домашних дел и заканчивая участием в производственном процессе. При решении множества задач роботам необходимо будет взаимодействовать с различными объектами, что для современных устройств крайне проблематично.
Чаще всего роботы могут обучиться этому, наблюдая за действиями человека, но для организации подобного обучения необходимы большие объёмы данных, показывающих действия людей. Сбор такой информации является дорогостоящим и трудоёмким процессом, а существующие открытые наборы данных зачастую уступают по объёмам тем, которые применяются для обучения иных методов искусственного интеллекта, например, генеративных моделей или компьютерного зрения.
В связи с этим китайские и сингапурские эксперты выступили с предложением о реализации альтернативного подхода, способного улучшить, удешевить и упростить процессы обучения роботов. Идея состоит в том, чтобы для обучения использовать видеоролики, которые ежедневно публикуются в сети, в качестве демонстрации роботам выполнения повседневных задач.
Авторы исследования отмечают, что вместо того, чтобы пользоваться видеороликами, которые специально снимаются для обучения роботов, как это делалось в прошлые годы, с помощью нового подхода можно будет использовать любые видеоролики, доступные в интернете.

Предложенная учёными идея базируется на трёх основных компонентах: Real2Sim, Learn@Sim и Sim2Real.
Компонент Real2Sim выступает в качестве основного и наиболее важного части системы. Он требуется для того, чтобы отслеживать движение объекта в видеоролике и воспроизводить аналогичные движения на виртуальной модели объектов в симуляции. Иными словами, действие человека на видеоролике воспроизводится в симуляции на компьютере.
В рамках реализации своего метода китайские и сингапурские учёные применяют сетки — высокоточные цифровые представления геометрии, формы и динамики объекта. С помощью компонента Real2Sim происходит воспроизведение демонстрации человека в симуляции, после чего следующий компонент Learn@Sim анализирует точки захвата и размещение, что позволяет роботу воспроизводить аналогичные действия с применением обучения с подкреплением.
После того как в симуляционной среде робот сможет определить точки захвата и размещения объекта, стартует следующий и завершающий этап с применением компонента Sim2Real, в котором изученная стратегия используется на реальном роботе с использованием двух манипуляторов.
По словам исследователей, разработанный ими метод позволяет обучаться по абсолютно любым видеороликам из интернета, так как в этом случае происходит извлечение трёхмерной модели движения объекта из видеоряда.
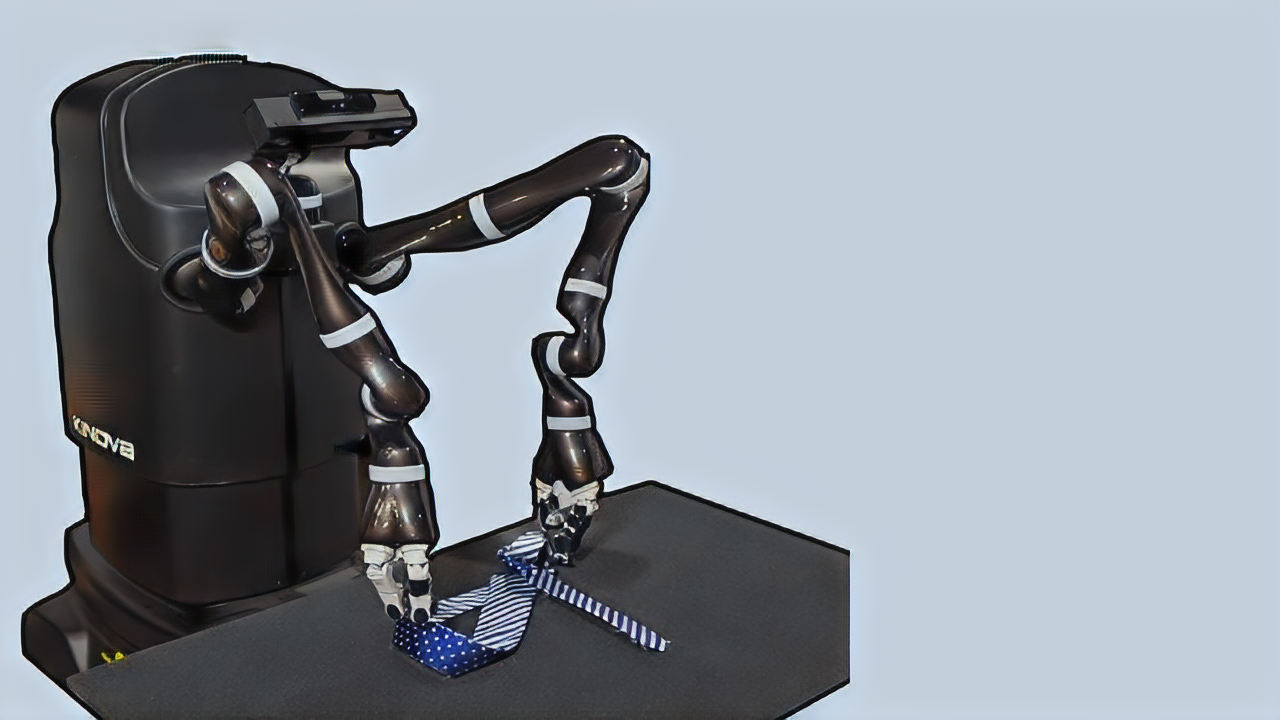
Свою новую технологию специалисты уже опробовали, поставив перед роботом задачу научиться завязывать галстук. Для большинства роботов эта задача является невероятно сложной, однако разработанная методика позволила роботизированному манипулятору с успехом её выполнить.
Ещё по теме:
- Бывшего инженера Samsung осудили за утечку данных в Китай
- Популярные приложения для знакомств угрожают конфиденциальности пользователей, распространяя их данные и геолокацию
- Китай воспользовался сбоем CrowdStrike, чтобы укрепить свои позиции в сфере ИБ


